08 Oct A Tale of Claw Machines and Quantum Mechanics
Why do we use optimal control?
Systems in quantum physics are often very hard to describe for a variety of reasons. They are usually extremely small, often impossible to observe directly or simply too complicated to simulate. However, if we manage to manipulate them, they have a lot of amazing applications [1]. So how do you manipulate something that you don’t perfectly understand? The answer is ‘Optimal Control’.
What does it have to do with claw machines?
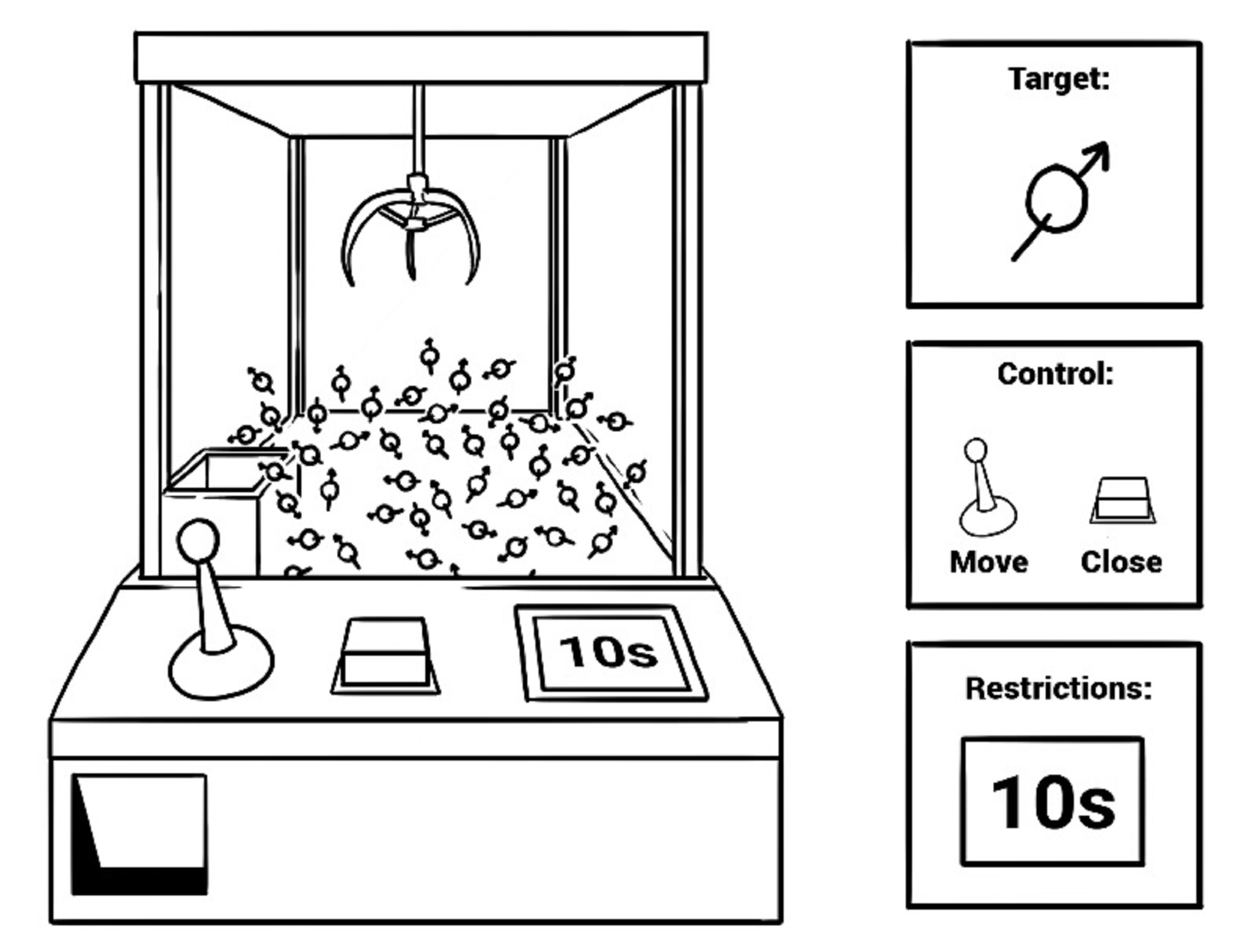
In quantum physics we describe particles by their state. This state sums up all the particle’s properties, such as the spin. I won’t go into the details of what spin means, but you can imagine it as a little magnetic arrow pointing in some direction. Manipulating the orientation of that spin compares to controlling a claw machine game with infinitely many toys: You know what you want, you know the controls and you only have a certain time to get there. But if you have ever played this game, you also know that it is extremely hard to get anything, let alone the plush tiger (or spin) that you always wanted. Let’s imagine we specifically want a spin that points into the upper righthand corner (see ‘target’). Because there are infinitely many spins, we can’t just collect all of them until only the target is left, so we will have to think of another strategy.
How does it work?
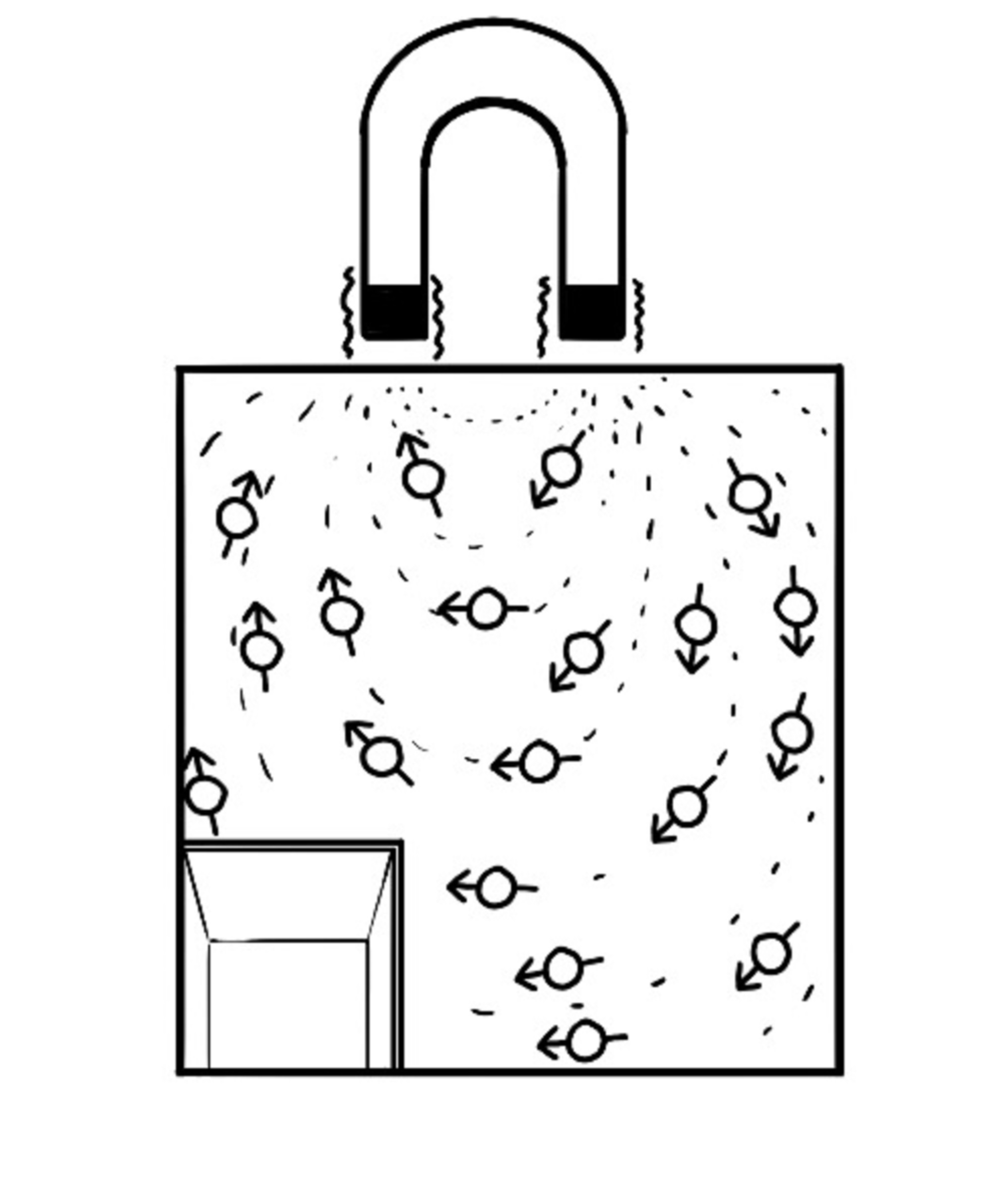
We can see that our spins point in many different directions, that is they are randomly aligned. Even if you managed to grab one that is close to the target, it might point into the opposite direction. To make the game a bit simpler, we apply a magnetic field, which arranges our magnetic arrows in a pattern. Now we know which region to go into. Even if our controls are not quite perfect, it means we can still get a spin that is at least similar to the target. In quantum control, we generally aim at getting as close as possible to our target, which does not always mean we get exactly what we were expecting!
Now the trick, once you get a good first attempt, is to try slightly different solutions (perturbations) in a smart way. In our case you could wiggle the joy stick about a bit to get the claw in the right angle, or click the ‘close’-button slightly earlier. Every time that you try something new, you write down how good your result is and compare it to the one before. You could, for example, assign a number between 1 and 10, where 1 is getting the opposite state and 10 getting the perfect state. We call this measure of goodness the ‘figure of merit’. If the new result was better, make the perturbation stronger. If it was worse, go back towards what you did before. If you pass the time limit, that of course means you get no result or rather a terrible result (for example 0).
Now that you probably have left a fortune in that claw machine to train, you can use your strategy and knowledge of the controls to optimise for that plush tiger, which you could have probably bought for half price in the next supermarket. But hey, not only have you finally won the war against this impossible machine, you have also learned about quantum mechanics.
Take Away
- Optimal control can be applied to any problem that has some controls, a target and possibly restrictions. It is a smart way to guess your next attempt.
- To compute the next optimal control step, you need to evaluate how good the previous one was by assigning a figure of merit.
- To get close to the target state, it can help to apply outside controls, which simplify the problem.
- With enough resources, many problems can be controlled (even those impossible claw machine or complicated quantum systems) to a certain precision.
[1] Website of the EU Quantum Technology Flagship: https://qt.eu/understand/introduction-to-quantum-physics/